I took the example of code for calibrating a camera and undistorting images from this book: shop.oreilly.com/product/9780596516130.do
As far as I understood the usual camera calibration methods of OpenCV work perfectly for "normal" cameras.
When it comes to Fisheye-Lenses though we have to use a vector of 8 calibration parameters instead of 5 and also the flag CV_CALIB_RATIONAL_MODEL in the method cvCalibrateCamera2.
At least, that's what it says in the OpenCV documentary
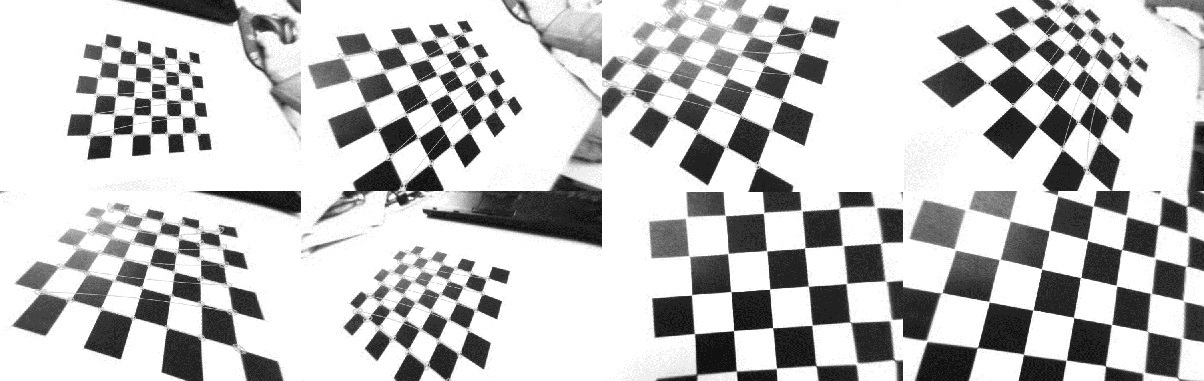
So, when I use this on an array of images like this (Sample images from OCamCalib) I get the following results using cvInitUndistortMap: abload.de/img/rastere4u2w.jpg
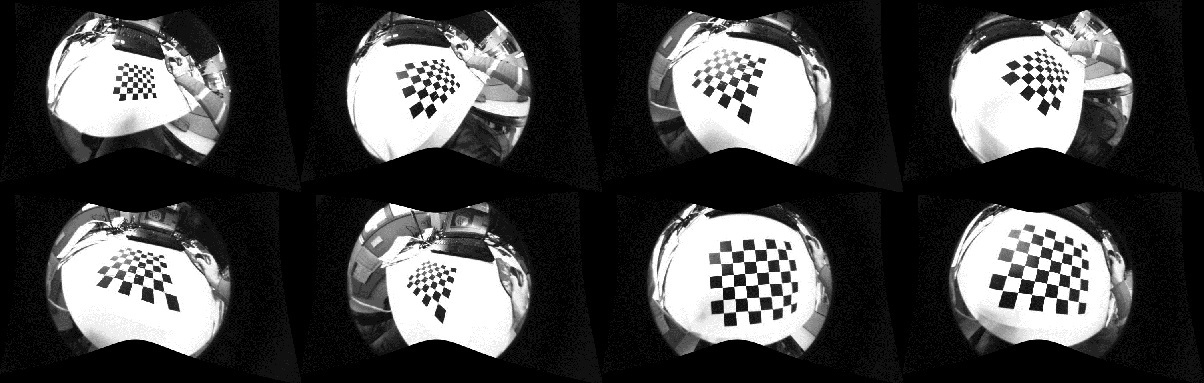
Since the resulting images are cut out of the whole undistorted image, I went ahead and used cvInitUndistortRectifyMap (like it's described here stackoverflow.com/questions/8837478/opencv-cvremap-cropping-image). So I got the following results: abload.de/img/rasterxisps.jpg
And now my question is: Why is not the whole image undistorted? In some pics of my later results you can recognize that the laptop for example is still totally distorted. How can I acomplish even better results using the standard OpenCV methods?
I'm new to stackoverflow and I'm new to OpenCV as well, so please excuse any of my shortcomings when it comes to expressing my problems.

{kind=link}
{kind=link}
{kind=link}
All chessboard corners should be visible to be found. The algorithm expect a certain size of chessboard such as 4x3 or 7x6 (for example). The white border around a chess board should be visible too or dark squares may not be defined precisely.
You still have high distortions at the image periphery after undistort() since distortions are radial (that is they increase with the radius) and your found coefficients are wrong. The latter are wrong since a calibration process minimizes the sum of squared errors in pixel coordinates and you did not represent the periphery with enough samples.
TODO: You have to have 20-40 chess board pattern images if you use 8 distCoeff. Slant your boards at different angles, put them at different distances and spread them around, especially at the periphery. Remember, the success of calibration depends on sampling and also on seeing vanishing points clearly from your chess board (hence slanting and tilting).